
What is Controlling Robot axis using brushless Dc Motor in MATLAB simulink?
Controlling Robot axis using brushless Dc Motor in MATLAB simulink is a MATLAB-based technical project and simulation model. MATLABSolutions demonstrate In this particular task, step-by-step guide to controlling a robot axis using brushless DC (BLDC) motor drives
Introduction
MATLABSolutions demonstrate In this particular task, step-by-step guide to controlling a robot axis using brushless DC (BLDC) motor drives
Methodology
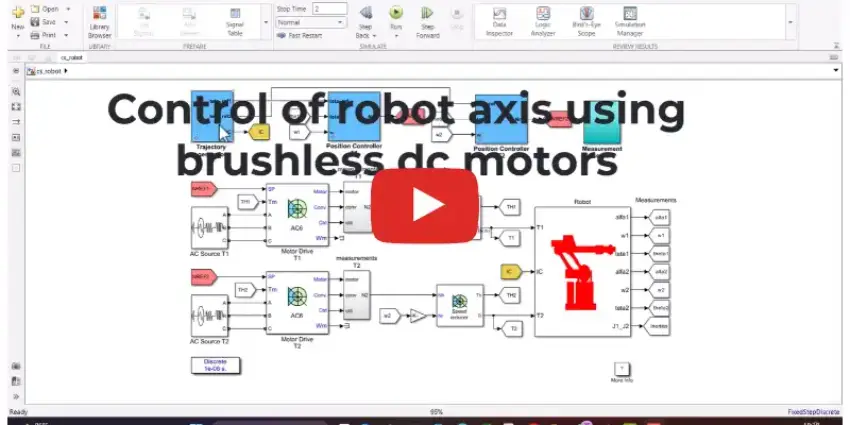
Understanding the System ComponentsBLDC Motor:Known for high efficiency and reliability, it requires an electronic controller for operation.Controller:Manages the motor’s speed and position using feedback loops.Sensors:Provide real-time data on motor position and speed.Modeling the Robot AxisSimulink Model:Create a model of the robot axis in Simulink. This includes the motor, controller, and sensors.Motor Dynamics:Use the Permanent Magnet Synchronous Motor (PMSM) block to represent the BLDC motor.Control Loops:Implement inner current control, middle speed control, and outer position control loops.Designing the Control SystemPosition Control Loop:The outermost loop, which ensures the motor reaches the desired position.Speed Control Loop:The middle loop, which controls the motor’s speed.Current Control Loop:The innermost loop, which manages the motor’s current to produce the required torque.Simulating the SystemSet Parameters:Define motor parameters such as resistance, inductance, and back-EMF constant.Run Simulations:Test the system with various trajectories to ensure the control system performs as expected.Analyzing ResultsPosition AccuracyCheck if the motor reaches the desired position accurately.Speed Response:Ensure the motor responds quickly to speed changes.Current Consumption:Monitor the current to ensure it stays within safe limits.